|
STUDIUL SENZORILOR SI TRADUCTOARELOR CAPACITIVE
1. Obiectul lucrarii
In aceasta lucrare se urmareste cunoasterea principalelor tipuri de traductoare capacitive si a principiului de functionare al acestora, cunoasterea celor mai utilizate scheme electrice de masurare aferente traductoarelor capacitive precum si determinarea exactitatii de masurare pentru traductoarele utilizate.
2. Notiuni teoretice
2.1 Senzori si traductoare capacitive
Senzorii si traductoarele capacitive fac parte din grupa senzorilor si traductoarelor parametrice si ele convertesc marimea neelectrica de masurat intr-o variatie de capacitate electrica. Schema electrica echivalenta a unui traductor capacitiv cuprinde reactanta capacitiva si rezistenta echivalenta pierderilor. In analiza schemelor cu senzori capacitivi se presupune, cu buna aproximatie, ca unghiul de pierderi este mic si se neglijeaza rezistenta de pierderi in comparatie cu reactanta capacitiva. Din punct de vedere constructiv, senzorii si traductoarele capacitive pot fi plane sau cilindrice.
Se disting urmatoarele tipuri de traductoare capacitive:
traductoare capacitive cu modificarea distantei dintre armaturi:
a) traductorul capacitiv cu o armatura fixa si una mobila (fig. 2.1).
Fig. 2.1 Traductorul capacitiv cu o armatura fixa si una mobila. Caracteristica de conversie.
Acest traductor are pentru Dd = 0:
C0 = e er ![]() (2.1)
(2.1)
unde
e este permitivitatea vidului;
er este permitivitatea relativa;
A este aria suprafetei de suprapunere a armaturilor;
d este distanta dintre armaturi.
iar pentru Dd ¹
C = C0 DC e er ![]() (2.2)
(2.2)
De aici rezulta:
DC = C0 ![]() (2.3)
(2.3)
Caracteristica de conversie prezinta o variatie parabolica si variatia capacitatii se poate considera liniara numai pentru deplasari reduse, de aceea aceste traductoare pot fi utilizate pentru masurarea deplasarilor foarte mici (0 ¸ 1) mm.
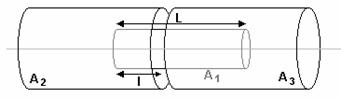
b ) traductorul capacitiv diferential este construit de obicei in varianta cu doua armaturi fixe A2 si A3 (armaturi exterioare) si o armatura mobila A1 (armatura interioara) (fig. 2.2). In acest caz pentru Dd = 0,
C1 = C2 = C0 =
e er ![]() (2.4)
(2.4)
iar pentru Dd ¹
C1 = e er ![]() (2.5)
(2.5)
C2 = e er ![]() (2.6)
(2.6)
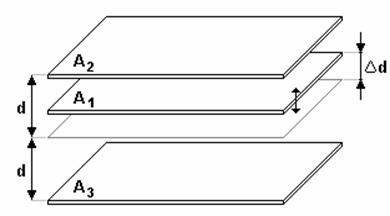
Fig. 2.2 Traductor capacitiv diferential.
Asemenea traductoare intra in structura micrometrelor electrice.
Utilizarea montajelor diferentiale permite o imbunatatire a sensibilitatii si o liniarizare a caracteristicilor.
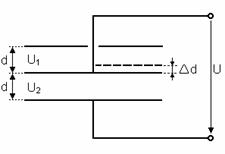
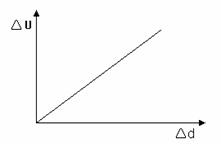
Fig. 2.3 Traductor capacitiv diferential. Caracteristica statica a traductorului.
Tensiunea U se imparte pe cele doua condensatoare astfel:
U1 = ![]() U =
U = ![]() U (2.7)
U (2.7)
respectiv
U2 = ![]() U =
U = ![]() U (2.8)
U (2.8)
rezultand DU = U2 U1 = ![]() U, deci dependenta
dintre DU si Dd este liniara.
U, deci dependenta
dintre DU si Dd este liniara.
Aceste traductoare se utilizeaza pentru masurarea deplasarilor mici, a presiunilor, etc.
traductoare capacitive cu modificarea suprafetei de suprapunere a armaturilor.
Acest tip de traductor se poate utiliza atat in varianta simpla, cat si in varianta diferentiala atat pentru deplasari liniare, cat si unghiulare ( fig. 2.4 ).
a) c)
b) d)
Fig. 2.4 Traductor capacitiv cu modificarea suprafetei de suprapunere a armaturilor:
- varianta simpla: a) de deplasare unghiulara;
b) de deplasare liniara;
- varianta diferentiala: c) de deplasare unghiulara;
d) de deplasare liniara.
Capacitatea traductorului este data de relatia:
C = e er ![]() a a (2.9)
a a (2.9)
unde:
n este numarul de electrozi;
a este unghiul sectorului circular;
r este raza sectorului circular;
d este distanta dintre electrozi;
a este deplasarea unghiulara.
Traductoarele capacitive de deplasare liniara se utilizeaza pentru masurarea deplasarilor liniare pentru lungimi pana la 20 mm (egale cu lungimea electrozilor).
traductoare capacitive cu modificarea permitivitatii mediului dintre armaturi.
Aceste traductoare au toate armaturile fixe (fie ca sunt cu doua armaturi, fie ca sunt cu mai multe armaturi, caz in care se obtin n condensatoare in paralel, rezultand astfel un traductor cu sensibilitate marita), dielectricul modificandu-se fie prin introducerea unui material izolant omogen (de ep dat), fie prin modificarea starii fizice a acestuia cu umiditatea, substante diferite, etc.
Aceste traductoare se utilizeaza pentru masurarea nivelelor, a grosimilor, a umiditatii etc.
2.2 Scheme de masurare pentru traductoare capacitive
Principalele scheme de masurare pentru traductoarele capacitive sunt:
a) puntile de c.a.;
b) schemele cu A.O. in curent alternativ.
In continuare vor fi prezentate patru scheme mai uzuale dintr-o larga diversitate si care pot fi utilizate atat pentru traductoarele capacitive cu un singur condensator, cat si pentru cele diferentiale.
Fig. 2.5 Schema de masurare cu punte de c.a.
Schema contine:
GF - generator de frecventa;
P - punte de c.a.;
C1 ,C2 - traductoare;
A - amplificator si adaptor de impedanta;
Rj - redresor ;
FTJ - filtru trece jos;
mV - milivoltmetru de c.c.
Observatie. In cazul puntii de c.a., impedantele Z1 si Z2 sunt reprezentate fie de doua rezistoare, fie de alte doua condensatoare sau de un divizor inductiv. Astfel, in cazul traductorului diferential, condensatoarele C1 sI C2 reprezinta cele doua capacitati ale traductorului, iar in cazul traductorului simplu C1 este un condensator fix sau variabil (pentru echilibrarea schemei), iar C2 este condensatorul propriu-zis al traductorului.
In fig. 2.6 este prezentata o schema de masurare cu punte de diode, care furnizeaza la iesire o tensiune continua.
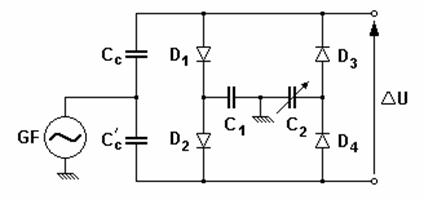
Fig. 2.6 Schema de masurare cu punte de diode.
Schema contine:
GF - generator de frecventa;
C1 si C2 - traductoare;
Cc si C'c - condensatoare de cuplaj;
D1, D2, D3, D4 - diode;
mV - milivoltmetru de c.c.
In cazul traductorului simplu C1 este un condensator fix si C2 este condensatorul propriu-zis al traducto-rului, iar in cazul, iar in cazul tr aductorului diferential C1 si C2 reprezinta cele doua capacitati ale traductorului, iar capacitatile Cc,C'c >> C1,C2 si Cc = C'c.
In fig. 2.7 este prezentata o schema de masurare cu A.O. inversor pentru traductoare capacitive. Rezistenta R1 are un rol de protectie a intrarii inversoare si rezistenta R2 permite circulatia curentului continuu de polarizare a aceleasi intrari.
Montajul este liniar in urmatoarele cazuri:
a) C1 este un condensator cu suprafata de suprapunere a armaturilor variabila, C2 este un condensator fix;
b) C1 este un condensator fix, C2 este un condensator cu o armatura fixa si una mobila.
Fig. 2.7 Schema de masurare cu A.O. inversor pentru traductoare capacitive.
Schema contine:
GF - generator de frecventa;
C1 ,C2 - traductoare;
AD - amplificator diferential;
Rj - redresor cu detectie de faza;
FTJ - filtru trece jos;
DR - divizor rezistiv de tensiune;
mV - milivoltmetru de c.c.
In fig. 2.8 este prezentata o schema de masurare cu A.O. neinversor pentru traductoare capacitive.
Fig. 2.8 Schema de masurare cu A.O. neinversor pentru traductoare capacitive.
Schema contine:
GF - generator de frecventa;
C1 ,C2 - traductoare;
AD - amplificator diferential;
Rj - redresor cu detectie de faza;
FTJ - filtru trece jos;
DR - divizor rezistiv de tensiune;
mV - milivoltmetru de c.c.
2.3 Determinarea exactitatii de masurare pentru un traductor sau sistem de masurare
Exactitatea de masurare este o caracteristica metrologica descrisa cantitativ de eroarea instrumentala totala, et
½et½ ½ej½ ½ef½ (2.10)
sau practic,
et ![]() (2.11)
(2.11)
unde:
ej - eroarea de justete (eroarea sistematica);
ef - eroarea de fidelitate (eroarea aleatoare).
Eroarea de justete, ej reprezinta abaterea valorii medii masurate (Xmed) fata de valoarea teoretica
("adevarata" Xe) si reprezinta efectul cumulat al erorilor sistematice:
½ej½ ½ez ep el eh ed½ (2.12)
unde:
ez este eroarea de zero;
ep este eroarea de proportionalitate;
el este eroarea de liniaritate;
eh este eroarea de histerezis;
ed este eroarea de drift (deriva).
In valoare absoluta, eroarea de justete (globala) este data de relatia:
DXj = Xmed Xe (2.13)
iar eroarea de justete raportata este data de relatia:
ej =![]()
![]() (2.14)
(2.14)
Eroarea de fidelitate, ef, reprezinta abaterea masuratorilor individuale fata de media rezultatelor (sunt erori aleatoare datorate imperfectiunii mijlocului de masurare) si se determina statistic printr-o estimare, in general ca eroare absoluta DXf :
DXf = ts (2.15)
unde:
t (n,p) este o constanta probabilistica cu care se inmulteste abaterea medie patratica, astfel incat valorile masurate sa apartina intervalului (Xmed ts , Xmed + ts) cu o anumita probabilitate (conform repartitiei Student);
s este abaterea medie patratica sub una din urmatoarele doua forme:
sn-1, pentru esantioane mici (n <
sn, pentru esantioane mari (n
care sunt date de relatiile (2.16) respectiv (2.17).
sn-1 =![]() (2.16)
(2.16)
sn =  (2.17) unde:
(2.17) unde:
Xmed reprezinta media celor n valori si este dat de relatia
Xmed
=![]() (2.18)
(2.18)
Eroarea de fidelitate raportata se calculeaza cu relatia:
ef ![]() (2.19)
(2.19)
La verificarea aparatelor de masura sau a sistemelor de masurare, aceste determinari se efectueaza pentru reperele reprezentative (principale) ale fiecarui domeniu de masurare.
Observatie. Eroarea instrumentala totala estimata caracterizeaza mijlocul de masurare pe intreg domeniul de masurare D = (Xmax Xmin).
3. Desfasurarea lucrarii
3.1 Chestiuni de studiat
3.1.1 Determinarea caracteristicii de conversie C = C (x) si a erorii de liniaritate el = f (x) pentru traductorul capacitiv de deplasare liniara cu modificarea suprafetei de suprapunere a armaturilor.
3.1.2 Determinarea exactitatii de masurare pentru n = 10 determinari pe reper (5 seturi de tip "crescator-descrescator").
3.2 Modul de lucru si de prelucrare a datelor experimentale obtinute
3.2.1 In vederea determinarii caracteristicii de conversie C = C (x) a traductorului capacitiv de deplasare liniara se va utiliza o punte RLC numerica EO 711.
Se vor efectua masuratori ale capacitatii traductorului in intervalul de deplasari (0 ) mm, din 0.1 in 0.1 mm, iar valorile masurate se vor trece in tabelul 2.1.
Tabelul 2.1
|
x [ mm ] |
|
|
|
|
|
|
|
Ce [ pF ] |
|
|
|
|
|
|
|
Cm [ pF ] |
|
|
|
|
|
|
|
el [ pF ] |
|
|
|
|
|
|
|
Si [ pF/mm ] |
|
|
|
|
|
|
unde
Ce = C0 kx (2.20)
in care:
C0 reprezinta valoarea capacitatii la x = 0;
k reprezinta panta
caracteristicii de transfer: k = ![]() .
.
el = ![]() (2.21)
(2.21)
in care D reprezinta domeniul de masurare.
Pentru fiecare interval al deplasarii x se va calcula sensibilitatea traductorului:
Si
= ![]() cu i (2.22)
cu i (2.22)
Se va calcula sensibilitatea medie a traductorului capacitiv de deplasare liniara ca fiind media sensibilitatilor calculate anterior pentru fiecare interval al deplasarii:
Smed =![]() (2.23)
(2.23)
Se vor trasa caracteristica de conversie C = C(x) si caracteristica el = f(x), tragandu-se concluzii asupra liniaritatii caracteristicii de conversie.
3.2.2 Algoritm (general) pentru etalonarea sau verificarea exactitatii de masurare a unui traductor sau sistem de masurare:
a) cunoasterea si respectarea in timpul verificarii (etalonarii) a parametrilor de functionare (tensiune de alimentare, frecventa, timp de masurare, temperatura mediului ambiant, etc.);
b) studiul derivei cu temperatura (eroarea de drift) se face la capetele domeniului de masurare, urmarind daca acestea "se deplaseaza" dupa punerea in functiune a traductorului (sistemului de masurare), determinarea facandu-se circa 30 de minute in conditiile in care ceilalti parametri sunt metinuti constanti;
c) studiul histerezisului observandu-se daca acesta este "deplasabil" sau "stabil" prin analiza a cel putin 5 seturi de masuratori de tip "crescator-descrescator" in domeniul de masurare;
d) studiul erorilor de zero, de panta si neliniaritate prin comparatia dintre media valorilor obtinute pentru fiecare reper si valoarea teoretica;
e) estimarea erorii totale de justete cu specificatia ponderilor care intervin (de zero, de panta, etc.);
f) determinarea erorii de fidelitate pentru un numar n de date pe reper si o probabilitate P acceptata;
g) determinarea erorii totale a sistemului de masurare si implicit a exactitatii de masurare;
Utilizand o punte RLC numerica EO 711 se vor obtine 5 seturi de date de tip "crescator-descrescator" conform tabelului 2.2.
Tabelul 2.2
|
x [ mm ] |
|
|
|
|
|
|
|
|
Cm [ pF ] |
1c |
|
|
|
|
|
|
|
Cm [ pF ] |
1d |
|
|
|
|
|
|
|
Cm [ pF ] |
2c |
|
|
|
|
|
|
|
Cm [ pF ] |
2d |
|
|
|
|
|
|
|
Cm [ pF ] |
3c |
|
|
|
|
|
|
|
Cm [ pF ] |
3d |
|
|
|
|
|
|
|
Cm [ pF ] |
4c |
|
|
|
|
|
|
|
Cm [ pF ] |
4d |
|
|
|
|
|
|
|
Cm [ pF ] |
5c |
|
|
|
|
|
|
|
Cm [ pF ] |
5d |
|
|
|
|
|
|
In continuare cu ajutorul datelor obtinute se va completa tabelul 2.3.
|
x [ mm ] |
Ce [ pF ] |
Cmed [ pF ] |
sn [ pF ] |
ej |
ef |
et |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
unde
ej ![]() (2.24)
(2.24)
ef ![]() (2.25)
(2.25)
in care t (10 , 0,9973) = 4,09
iar et este dat de relatia
Se vor reprezenta caracteristicile Cmed = f (x) si ½et½ = f (x).
Prelucrarea rezultatelor obtinute la subpunctele 3.2.1 si 3.2.2 se va realiza folosind subrutinele adecvate din programul MATLAB.
4.Intrebari si probleme
4.1 Care sunt principalele tipuri de traductoare capacitive si schemele electrice cele mai uzuale in care se utilizeaza aceste traductoare?
4.2 Care este algoritmul de verificare a exactitatii de masurare a unui traductor sau sistem de masurare?
4.3 Identificati grafic componentele erorii de justete pentru traductorul capacitiv de deplasare liniara cu modificarea suprafetei de suprapunere a armaturilor si precizati care este clasa de exactitate a acestuia.
4.4 Ce este eroarea de fidelitate si cum se determina?
4.5 Ce este eroarea de justete si cum se determina?
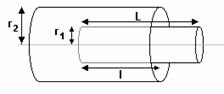
4.6 Pentru traductorul capacitiv de deplasare liniara cu modificarea suprafetei de suprapunere a armaturilor (fig. 2.9) sa se stabileasca expresia capacitatii C = C(x) cunoscand r1 = 6.5 mm , r11 = 17.5 mm ,er = 1.00059 si e F/m .
Fig. 2.9 Traductor capacitiv de deplasare liniara cu modificarea
suprafetei de suprapunere a armaturilor.
5.Anexa
Punte RLC numerica E
5.1Destinatie
Puntea RLC numerica E 0711 este un aparat de precizie, realizat cu microprocesor si prevazut cu interfata CEI 625, destinat masurarii componentelor R, L, C, factorului de pierderi (D) si factorului de calitate (Q) la frecventele de 100 Hz si 1 kHz, cu un semnal de cca 0.3 Vef.
Configuratia de masurare poate fi de tip SERIE sau PARALEL, iar modul de lucru MANUAL sau AUTOMAT, aparatul putand fi folosit atat pentru masurari manuale, cat si pentru masurari automate comandat prin calculator prin intermediul interfetei CEI
Rezutatul masurarii este prezentat pe un dublu afisaj cu 3 1/2 cifre (LED cu 7 segmente) pentru R, L, C, respectiv D sau Q, afisandu-se concomitent si unitatea de masura.
5.2 Caracteristici tehnice
Caracteristici tehnice generale:
- alimentare: retea 220V 10%; 50/60 Hz;
- putere absorbita de la retea: max. 55 VA;
- dimensiuni (inaltime x latime x adancime): 150x295x410;
- greutate: circa 6 Kg.
Domenii de masurare:
|
Parametru: Frecventa |
Extins - jos (Reducerea preciziei) |
Domenii de masurare (Eroarea de baza) |
Extins - sus (Reducerea preciziei) |
|
R: 100 Hz |
W W |
W .. 1.999 MW |
2MW .. 19.99 MW |
|
R: 1 kHz |
W W |
W .. 1.999 MW |
2MW .. 19.99 MW |
|
C: 100 Hz |
0.001 n 1.999 nF |
2.00 nF .. 1.999 mF |
2mF .. 19.99 mF |
|
C: 1 kHz |
0.001 n.. 0.199 nF |
0.200 nF .. 199.9 mF |
mF .. 1.999 mF |
|
D (pentru C) |
|
|
|
|
L: 100 Hz |
0.001 mH. 1.999 mH |
2.00 mH .. 999.9 H |
|
|
L: 1kHZ |
0.001 MH. 0.199 mH |
0.200 mH .. 199.9 H |
|
|
Q (pentru L) |
|
|
|
Frecventa tensiunii de masurare: 100 Hz; 1 kHz
Valoarea tensiunii de masurare: max 0.3 Vef;
Tip de masurare: SERIE sau PARALEL;
Mod de masurare: MANUAL sau AUTOMAT;
Mod de conectare: patru terminale masa;
Afisarea marimii masurate: 2x3 1/2 cifre pentru R, L, C, respectiv D (Q);
Viteza de masurare: circa 1.5 mas/s;
Eroarea de masurare de baza:
- rezistente (R): (0.2%ct. 2unit);
- capacitati (C): (0.2%ct. 2unit) D);
- inductante (L): (0.3%ct. 3unit) 1/Q);
- factor de pierderi (D): D)%ct.
- factor de calitate (Q): [Q 1/Q)%ct.
Eroarea de masurare in domeniul extins:
|
Parametrii: Frecventa |
Minim - baza |
Domeniul de masurare baza - maxim |
|
R: 100 Hz, 1 kHz |
5 MW |
|
|
C: 100 Hz |
6pF D) |
|
|
C: 1 kHz |
2pF D) |
|
|
L: 100 Hz |
0.005 mH 1/Q) |
|
|
L: 1 kHz |
0.002 mH 1/Q) |
|
5.3 Elemente externe de punere in functiune, comanda si control
Puntea RLC numerica E 0711 este proiectata pentru a fi alimentata de la reteaua de 220 Vef, 50/60 Hz. Aparatul se conecteaza numai la o priza de alimentare cu contact lateral de protectie legat la pamant. In cazul in care nu se dispune de o astfel de priza, este obligatoriu ca aparatul sa fie conectat la o priza de pamant prin borna de pamant de pe panoul sau din spate.
Elementele externe de comanda si control situate pe panoul fata al aparatului (fig. 2.10) sunt prezentate in tabelul 2.4.
Fig. 2.10 Panoul fata al puntii RLC E
Tabelul 2.4
|
Denumire |
Descriere |
Functiune |
|
Afisaj REC |
Afisaj numeric 3 1/2 cifre cu punct zecimal. |
Afisarea marimilor R, L, C masurate. |
|
Afisaj unitati |
Afisaj cu diode LED pentru W, kW, MW, mH, H, nF, mF, mF. |
Dioda aprinsa indica unitatea de masura. |
|
Afisaj D (Q) |
Afisaj numeric 3 1/2 cifre cu punct zecimal. |
Afisarea marimii D, pentru C/D selectat si a marimii Q pentru L/Q selectat. |
|
RETEA (POWER) |
Comutator retea. |
Conecteaza aparatul la retea pe pozitia apasat. |
|
LOCAL/DISTANTA (LOCAL/REMOTE) |
Comutator translatie. |
Apasat, selecteaza DISTANTA, relaxat selecteaza LOCAL; corelat cu interfata CEI |
|
Afisaj - stari interfata |
Afisaj cu patru diode LED pentru semnalizarea starilor. |
Dioda aprinsa indica: DISTANTA (REMOTE) regim distanta; VORBITOR (TALK) vorbitor activ; ASCULTÃTOR (LISTEN) ascultator activ; CERERE SERVICIU (SRQ) cerere de serviciu activa. |
|
R, L Q, C D |
Claviatura cu trei comutatoare independente R, L Q, C D. |
Selecteaza parametrul care trebuie masurat: R, L, C, Q pentru L si D pentru C. |
|
1kHz/100 Hz |
Comutator frecventa 1 kHz sau 100 Hz. |
Apasat, selecteaza frecventa de test de 1KHz. Relaxat, selecteaza frecventa de test de 100 Hz. |
|
PAR/SER (PRL/SER) |
Comutator pentru masurare tip PARALEL sau SERIE. |
Apasat, selecteaza modul de masurare PRL.Relaxat, selecteaza modul de masurare SER. |
|
|
Claviatura cu trei comutatoare interdependente pentru gamele 1, 2, 3. |
Selecteaza pe modul de lucru MAN, una din gamele de masurare. |
|
IEªIRE DIN GAMÃ (OUT OF RANGE) |
Afisaj cu doua diode LED pentru dirijarea spre gama optima de masurare (MANUAL). |
Aprinse, ghideaza spre gama optima de masurare. Stinse, puntea este pe gama cu eroare de masurare optima. Indicatoarele indica sensul: stanga pentru gama mai mica, respectiv dreapta pentru gama mai mare. |
|
Denumire |
Descriere |
Functiune |
|
AUTO/MAN |
Comutator mod AUTOMAT sau MANUAL. |
Apasat, selecteaza modul de lucru AUTO in care gamele se schimba automat pentru masurare cu eroare minima. Relaxat, selecteaza modul de lucru MAN in care sunt utilizate comutatoarele de gama 1 |
|
I, U, U, I |
Borne de intrare pentru masurare cu patru terminale si masa (2 terminale si masa in configuratia I U), ( I U). |
Permit conectarea adaptoarelor pentru masurarea componentelor R, L, C. |
5.4 Efectuarea masuratorilor
Valoarea parametrului principal (R, L sau C) al impedantei necunoscute depinde de care din cele doua circuite echivalente este aleasa pentru a o reprezenta. Cu cat este mai "curata" rezistenta sau reactanta, cu atat mai identice sunt valorile serie sau paralel. Insa pentru D sau Q 1 diferenta devine substantiala. De asemenea valoarea parametrului principal depinde adeseori de frecventa tensiunii de masurare. Astfel cu cat este mai "curata" aceasta rezistenta sau reactanta, cu atat mai mica este dependenta.
In general daca fabricantul de componente nu specifica expres cum sa se efectueze masuratorile,acestea se vor efectua astfel:
Rezistente sub 1kW SER 100 Hz
Pentru a fi cat mai aproape de valoarea de curent continuu se selecteaza frecventa de 100 Hz pentru a minimiza pierderile si SER pentru ca cel mai adesea componenta reactiva prezenta este inductanta serie care nu intra in calculul pentru RSER.
Rezistente peste 1kW PRL 100 Hz
Frecventa de 100 Hz se selecteaza din aceleasi ratiuni ca mai sus, iar PRL deoarece componenta reactiva este capacitatea paralel (in rezistentele de valori mari).
Capacitati sub 2 nF: SER 1kHz
Esentiala este frecventa de 1 kHz care permite puntii o masurare mai precisa.
Capacitati peste 200 mF: SER 100 Hz
Frecventa mai mica permite masurarea capacitatilor mari (impedanta echivalenta este mai apropiata de rezistenta de referinta ( W) a gamei 1).
Inductante sub 2 mH SER 1 kHz
Frecventa mai mare permite puntii o masurare mai precisa (impedanta echivalenta este mai apropiata de de rezistenta de referinta ( W) a gamei 1).
Inductante peste 200 H SER 100 Hz
Frecventa mai mica permite o masurare mai precisa (impedanta echivalenta este mai apropiata de rezistenta de referinta (100 kW) a gamei 3).
