Sistemul International de Unitati de masura (S.I.)
-fundamentale
Marimi fizice
-derivate
Marimi fizice fundamentale
|
MARIMEA |
SIMBOLUL |
UNITATEA DE MASURA |
SIMBOL |
|
|
|
Lungimea |
l (d,s) |
metrul |
M |
|
|
Timpul |
T |
secunda |
T |
|
|
Masa |
m(M) |
kilogramul |
Kg |
|
|
Cantitatea de substanta |
----------- |
mol |
mol |
|
|
Temperatura absoluta |
T |
grad Kelvin |
K |
|
|
Intensitatea curentului electric |
I |
amper |
A |
|
|
Intensitatea luminoasa |
I |
candela |
Cd |
MULTIPLI SUBMULTIPLI
|
Prefix |
Factor de multiplicare |
simbol |
prefix |
factor de multiplicare |
Simbol |
|
Deca- |
10 |
da- |
deci |
10 |
d- |
|
Hecto- |
10 |
h- |
centi |
10 |
c- |
|
Kilo- |
10 |
k- |
mili |
10 |
m- |
|
Mega- |
10 |
M- |
micro |
10 |
m |
|
Giga- |
10 |
G- |
nano |
-9 10 |
n- |
|
Tera- |
10 |
T- |
pico |
10 |
p- |
|
Exa- |
10 |
E- |
femto |
10 |
f- |
|
Peta- |
10 |
P- |
atto |
10 |
a- |
O -10
Angstrom 1A = 10 m
Nonosecunda(ns)=10 -9 s 1km/h=![]() m/s
m/s
[m]=kg [V]=m3
[G]=N (Newton) ![]()
greutetea : G=m q
densitate:=![]()
![]() scalare- valoare numerica si unitate de masura : masa,
timpul, volumul
scalare- valoare numerica si unitate de masura : masa,
timpul, volumul
energia, lucrul mecanic,;
![]() Marimi
fizice *Se
comporta ca niste numere
Marimi
fizice *Se
comporta ca niste numere
*Operatia de adunare si scadere se pote realiza numai intre marimi de
acelasi tip;
vectoriale -valoare numerica si unitate de masura, directie si sens (se reprezinta prin vec-
tori):viteza, acceleratia, forta;
![]() Vectorul segment
orientat
Vectorul segment
orientat
F
Operati cu vectori:*adunarea (compunera) vectorilor.
*scaderea vectorilor
*produsul a doi vectori scalari
vectoriali
*descompunerea a unui vector dupa un scalar
* impartire a unui vector cu un scalar
* expresie analitica a 2 vectori
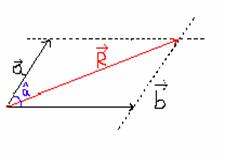
1) Adunarea vectorilor :
regula paralelogramului
a) *metoda grafica(1) regula poligonului
Regula paralelogramului
R2 = a2 + b2 + 2abcs a
b) Metoda analitica - pp. scrierea analitica a unui vector.
- pp. sa cunoastem descompunerea unui vector dupa doua
directii date
![]()
![]() x0y
---> plan (1) y z
x0y
---> plan (1) y z
axe de coordonate : {
0xyz ---> spatiu (2) (1) (2)

![]()
![]() x y
x y
0 0
x
a = ax e ay j az k
![]() e : (0x)
e : (0x)
![]() j : (0y)
j : (0y)
![]() > s.n. versorii ascelor
> s.n. versorii ascelor
k : (0z)
Versor = vectorul de modul egal cu unitatea
e a
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() x
x
![]() 0 ax
0 ax
![]()
![]()
![]()
![]()
![]() ax = a
ax = a
- metoda grafica(2)
![]()
![]() regula
paralelogramului
regula poligonului
regula
paralelogramului
regula poligonului
![]()
![]()
![]()

![]()


![]()
 b
b
 --> -->
--> -->
 a R a c
a R a c

![]()
 ---->
---->
![]() R --> -->
R --> -->
a R -->
![]()
![]() R
R
---> a
--->
a
Miscarea rectilinie uniforma
Ecuatia de miscare x x0 v(t t0)
este miscarea ce se executa pe o linie dreapta cu acceleratie constanta ;
![]()
![]() poate fi accelerata - daca acceleratia este mai
mare decat 0 ;
poate fi accelerata - daca acceleratia este mai
mare decat 0 ;
incetinita - daca acceleratia este mai mica decat 0 ;
Legea vitezei v v0 a(t - t0)
Legea spatiului : x x0 v0( t - t0) a( t - t0)2
Ecuatia lui Galilei v2 v 2a( x - x0)
Timpul si spatiul pana la oprire v = v0 at
V
a top = ![]()
Principiile mecanicii Newtoniene si tipuri de forte
Pricipiul inertiei
![]()
un punc material isi pastreaza starea de repaus relativ sau de miscare rectilinie uniforma atat timp cat asupra sa nu actioneaza alte corpuri care sa-i schimbe aceasta stare ;
Principiul fundamental al dinamicii :
![]()
- daca asupra unui corp actioneaza o forta , aceasta ii imprima corpului o acceleratie proportionala cu forta si invers proportionala cu masa , pe aceasi directie si sens cu forta ;
Impulsul : - produsul dintre masa si viteza sa
![]()
P = m V
> F = ma
F = DP
Dt
Principiul actiunilor reciproce (reactiunii si a actiunii):
![]()
- Oricare doua corpuri actioneaza intre ele;
- Daca primul corp actioneaza asupra celuilalt cu o forta,,F12 '' numita actiune , cel de al doilea corp va actiona asupra primului cu o forta egala in modul , de aceasi directie dar de sens opus numita reactiune ,,F21'' ;
Principiul suprapunerii fortelor:
![]()
- daca mai multe forte actioneaza simultan asupra unui punct material , fiecare forta va imprima corpului o acceleratie ,,a'' independent de prezenta celorlalte forte , acceleratia rezultanta fiind suma vectoriala a acceleratiilor individuale ;
Interactiunea elastica.
![]()
rolul fortei elastice este acela de a aduce corpul in pozitia initiala dupa incetarea fortei deformatoare ;
Legea lui Hooke
![]()
Dl ![]()
Forta de frecare
![]()
forta ce se executa la contactul dintre doua corpuri si care se opune deplasarii acestora ;
este continuta in planul alunecarii
Legile ferecarii
![]()
forta de frecare depinde de tipul si de modul de prelucrare al materialelor ce vin in contact ;
depinde direct proportional de forta de apasare normala , coeficientul de proportionalitate numindu-se coeficient de frecare'' ;
forta de frecare nu depinde de marimea suprafetelor ce vin in contact ;
Miscarea corpurilor pe planul inclinat
![]()
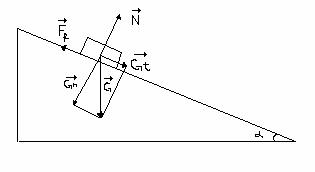 Gt = Gsina
Gt = Gsina
Gn = Gcosa
Miscarea circulara uniforma
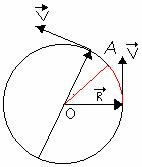
OA = raza vectoare
V = viteza liniara
V ![]() s
= coordonata curbilinie
s
= coordonata curbilinie
V = R ![]()
![]() =
= ![]()
V = R![]()
![]()
![]()
![]() viteza unghiulara
viteza unghiulara
w Rad s
![]()